#algorithms
Read more stories on Hashnode
Articles with this tag
Introduction Taking a look at ROS1's navigation stack, the global planner's default implementation is either A* or Dijkstra, both of which are classic...
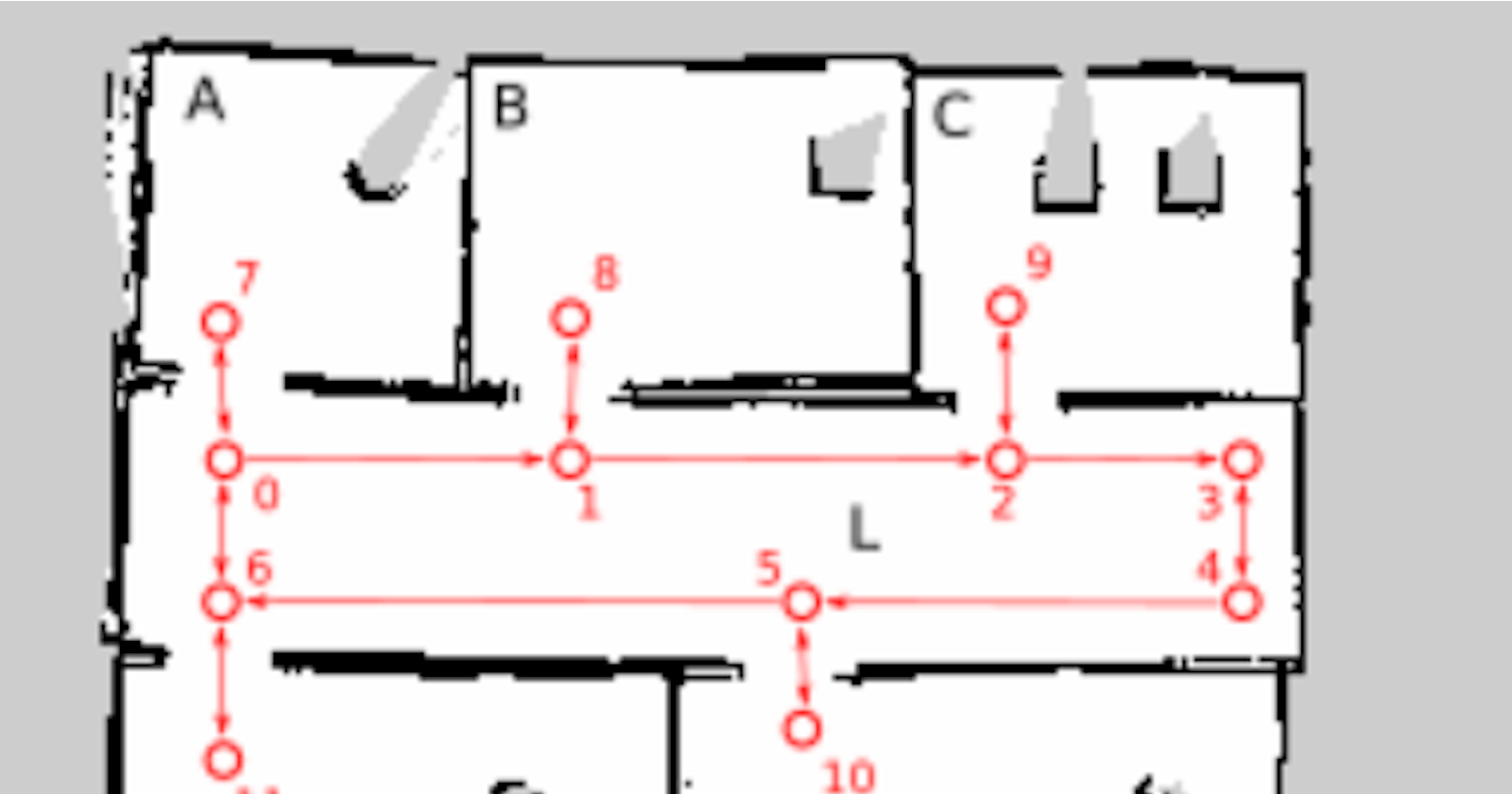
Introduction Many mobile robot path plannings are done in grid maps, especially if it is a ground robot operating in a planar environment. Indeed,...