#engineering
Read more stories on Hashnode
Articles with this tag
为了实现Seirios的无差错导航,我们的软件最适合以下硬件要求和配置。 推荐的 PC 要求 🔹最低为四核,8线程CPU@2.4 GHz。(双摄像头最低六核,12程CPU@ 2.4 GHz) 🔹 16GB DDR4 内存 🔹 128GB 固态驱动器 (SSD) 🔹 1x RJ45...
For error-less navigation with Seirios, our software works best with the following hardware requirements and configurations. Recommended PC...
Introduction Taking a look at ROS1's navigation stack, the global planner's default implementation is either A* or Dijkstra, both of which are classic...
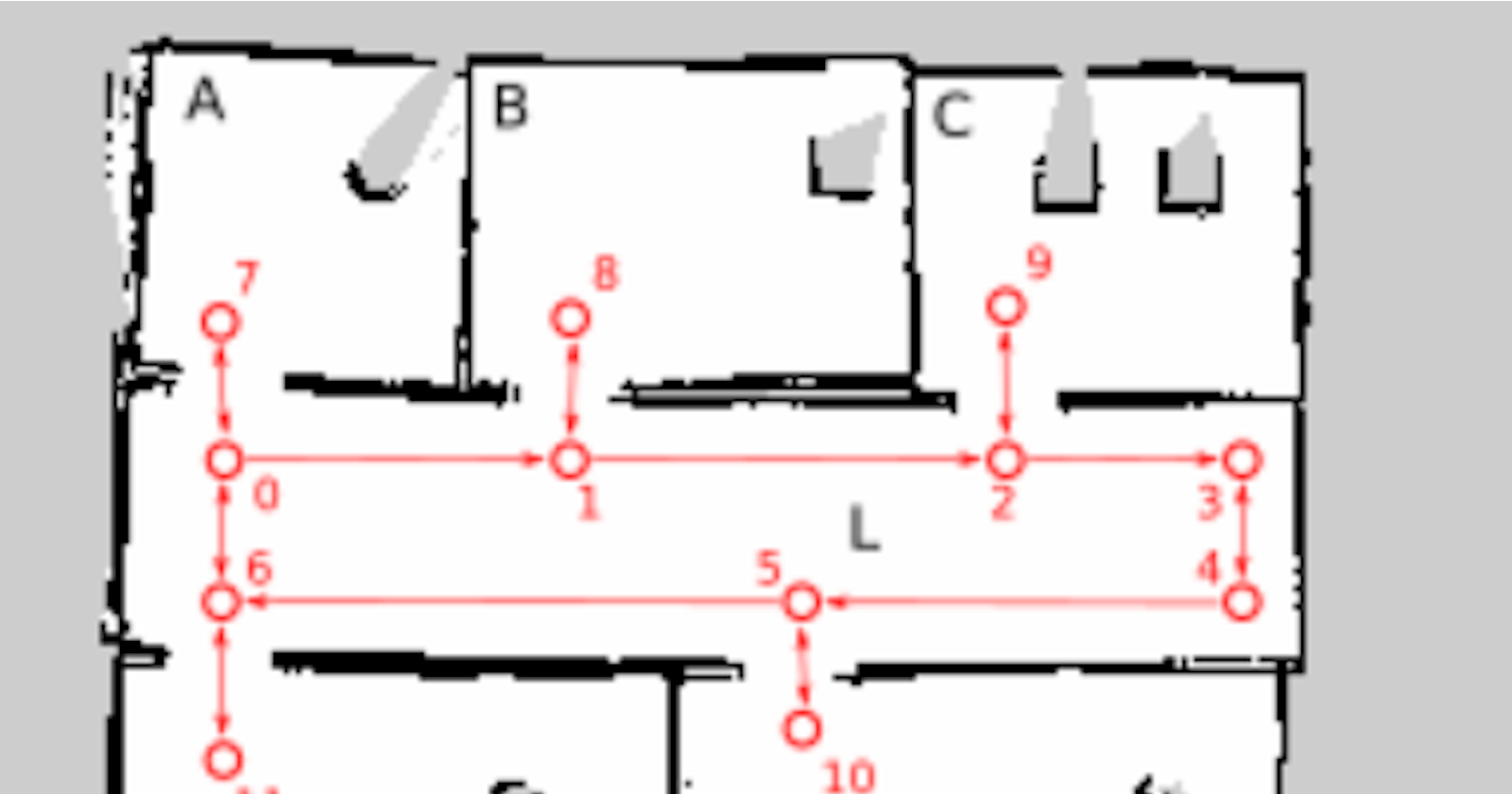
Introduction Many mobile robot path plannings are done in grid maps, especially if it is a ground robot operating in a planar environment. Indeed,...